
Cornell AutoBoat
Project Team
Where Innovation meets Passion Click a boat!

Aboat
the Crew
We are a student-run team of hardware and software engineers, dedicated to building and innovating in the field of naval architecture and marine robotics. Our driven members challenge themselves in a fast-paced work environment and make lifelong connections.
2025-2026 Competition Cycle
Incremental hardware updates, significant software changes, and an emphasis on testing.
Design
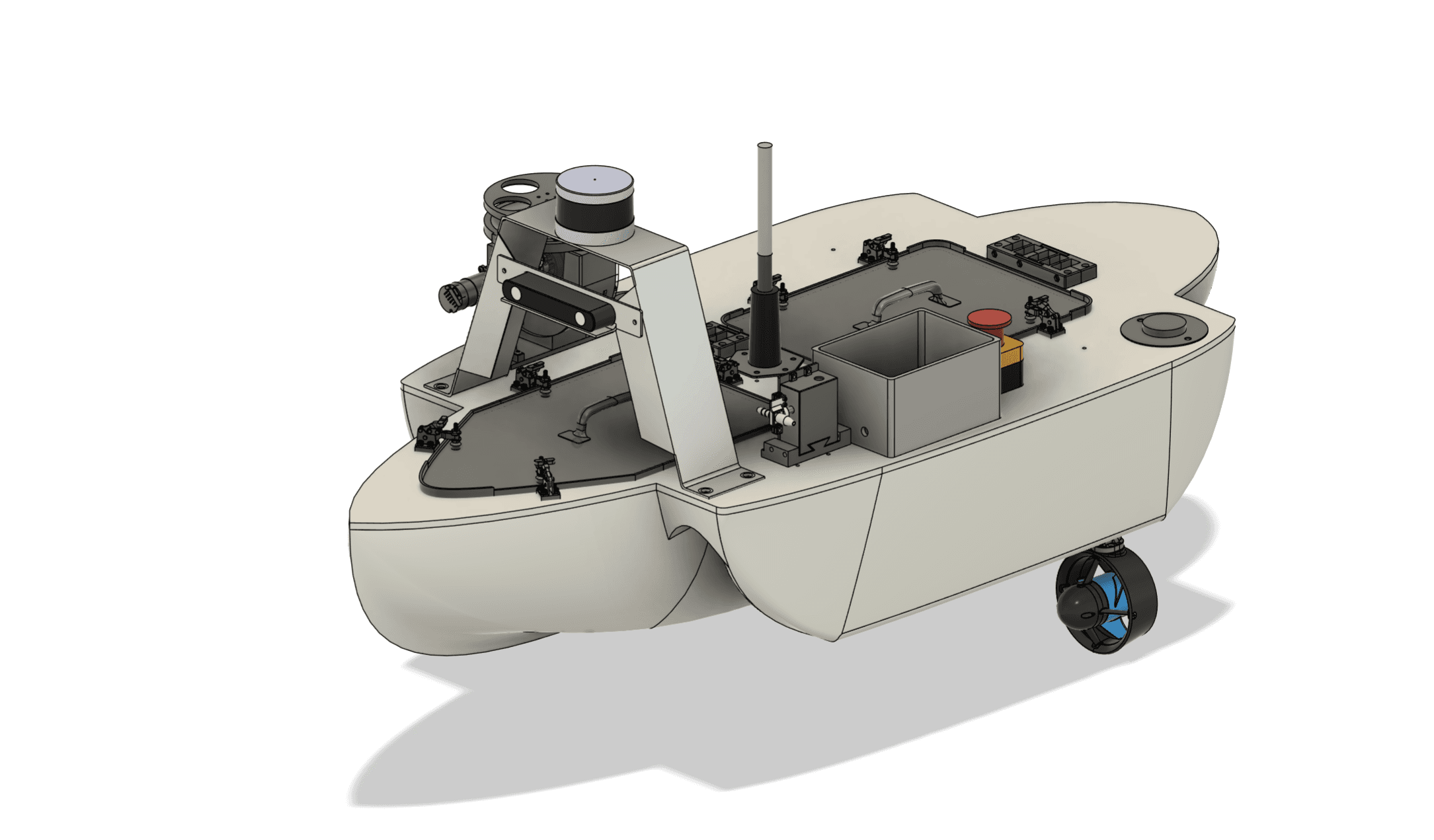
This year's design cycle is centered on a complete rebuild of the boat, incorporating improvements identified during the previous cycle. The focus spans both hardware and software, with a redesigned hull and upgraded internal systems paired with significant changes to the codebase to improve autonomous performance.
- New main hatch design for increased access and improved ergonomics
- Integrated bridge deck and ama beams to improve structural integrity
- Simplified modular electrical bay design to streamline setup and troubleshooting
- New computer vision mast for a redesigned sensor suite
- Buoy deflectors for improved navigation capabilities
- Higher power thrusters for increased speed
- Upgraded and specialized PCBs for power distribution, kill switch, and POE injection
- Custom microcontroller board for reliability and flexibility
- Custom battery monitoring system to improve safety
- More robust power distribution relays for up to 60A of current
Manufacturing
This year's competition cycle involves the development of a new boat, with significant updates to both the hull and internal systems. We are also revamping our manufacturing method, using a single female mold for the hull instead of multiple male molds. Manufacturing spans a range of processes, including large-scale composite work for the hull, as well as sheet metal bending, laser cutting, and CNC machining. Shown below is a time-lapse of our manufacturing team completing the fiberglass layup for our previous main hull mold!

Testing
On-water testing is the team's main priority this year. This gives the software team as much time as possible to develop and troubleshoot AI, CV, and Controls code in an environment similar to competition. We test outdoors on a lake as much as possible. However, when weather conditions don't allow it, indoor pool testing is crucial to stay on top of our timeline. In these cases, we use an ultrasonic positioning system in lieu of a GPS for positional tracking.
Research
Our team is focused on preparing for RoboBoat 2026, with a few members doing research and early-stage design for more complex, longer term projects.
- Holonomic propulsion system
- 3-DOF robotic arm
- Custom motor ESCs
- Custom buck-boost converters
- Active water cooling system
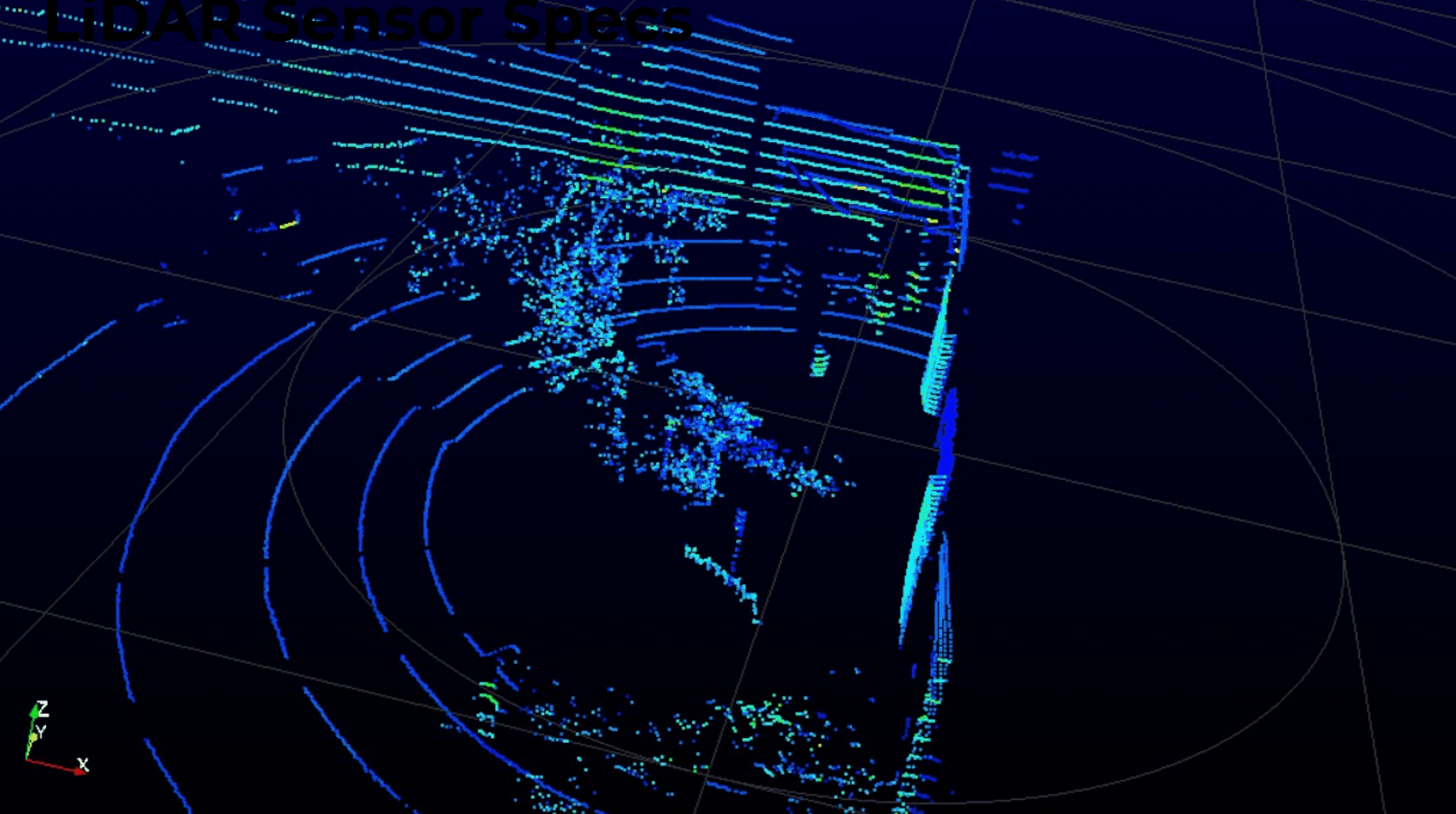
- LiDAR integration
- Obstacle Avoidance algorithms
- Non-ideal Sims perception
- 3D virtual simulations
- YOLO hyperparameter tuning
Technical Report
↗Our Network
AutoBoat has served as a gateway to incredible opportunities in industry. Check out some of companies our current members and alumni have worked at.
